Réalisation d'un drone à base d'Arduino - Chapitre 1

Sommaire
Bonjour à tous, aujourd'hui je vous propose une série de tutoriels dont la trame principale est la conception et réalisation d'un quadricoptère de type X basé sur un Arduino Uno.
Un sujet vaste et des plus passionant !
Dans ce premier tutoriel, nous allons aborder les conceptes de bases, faire un état de l'art des drones et essayer de démystifier un peu ces engins qui font tant parler d'eux.
1. Qu'est-ce qu'un drone ?
Avouons-le, dès qu'on entend/lit le mot "drone", on pense toute de suite à ça :

Mais en fait, un drone peut très bien être aussi ça :

De manière générale, un drone désigne un aéronef sans pilote à bord qui peut être télécommandé ou en pilotage automatique. Il peut avoir un avoir un usage civil ou militaire.
Une définition assez large donc !
Les engins auxquels nous allons nous intéresser sont les quadrirotors (ou quadricoptères), une catégorie bien précise de drones.
Un quadrirotor est un aéronef à voilure tournante comportant quatre rotors pour sa sustentation. Les rotors sont généralement placés aux extrémités d'une croix, mais on peut trouver toute sorte de cadres (en H, en X, en T...etc).
Et c'est là qu'on pose les bases de notre futur cahier des charges : nous allons réaliser un quadricoptère de type X.
Dans le cadre de notre série de tutoriels, voici le schéma que j'utiliserai à chaque fois comme référence :
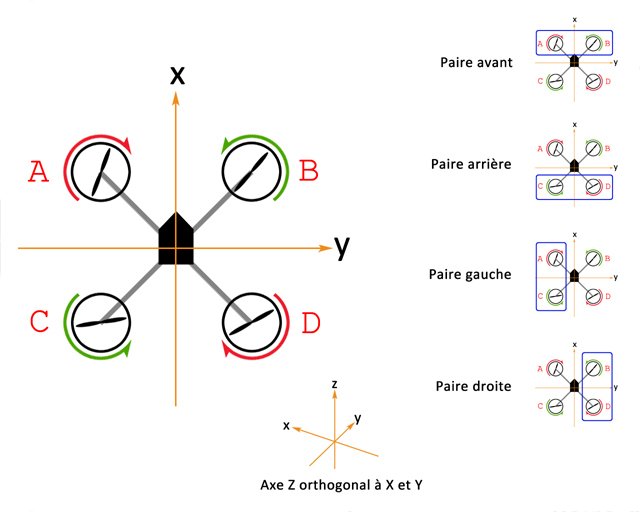
Pourquoi les hélices ne tournent pas toutes dans le même sens ?
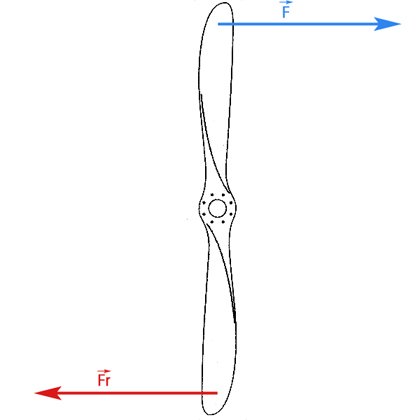
D'après la troisème loi de M. Newton, toute masse soumise à une force (ou action) oppose à celle-ci une force qui lui est égale et de sens opposé (encore appelée réaction). Et les hélices d'un drone n'y échappent pas !
En clair, une hélice qui tourne génère une force de réaction opposée à son sens de rotation.
Maintenant, si toutes les hélices tournent dans le même sens, les forces de réaction se cumulent et le quadricoptère va se mettre à tourner sur lui-même (sur son axe de lacet).
En alternant les sens de rotation deux à deux et lorsque les hélices tournent à la même vitesse, les forces de réaction se compensent et le drone conserve son orientation.
2. Mécanique des déplacements
Si nous voyons maintenant à quoi ressemble un drone globalement, nous allons essayer d'expliquer comment il se déplace dans les airs.
Tout d'abord, définissons les trois axes de mouvement d'un drone :
- Axe X : axe de roulis (Roll en anglais)
- Axe Y : axe de tangage (Pitch en anglais)
- Axe Z : axe de lacet (Yaw en anglais)
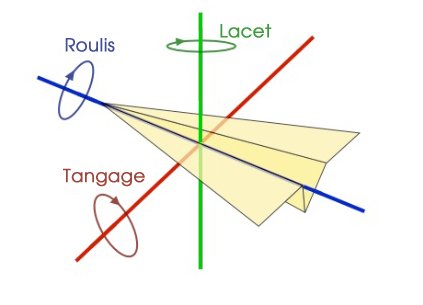
Traduit en français, le roulis correspond au mouvement de bascule de gauche à droite, le tangage, d'avant en arrière et le lacet, rotation sur lui-même.
Nous l'avons vu, ce sont les hélices, par leur rotation, qui permettent au drone de s'élever dans les airs. En effet, lorsqu'elles sont parallèles au sol, elles génèrent une force perpendiculaire, mais que se passe-t-il lorsqu'elles sont inclinées ?
Lorsqu'on représente les forces sur un schéma, on visualise immédiatement que l'inclinaison de l'héclice génère une force latérale.
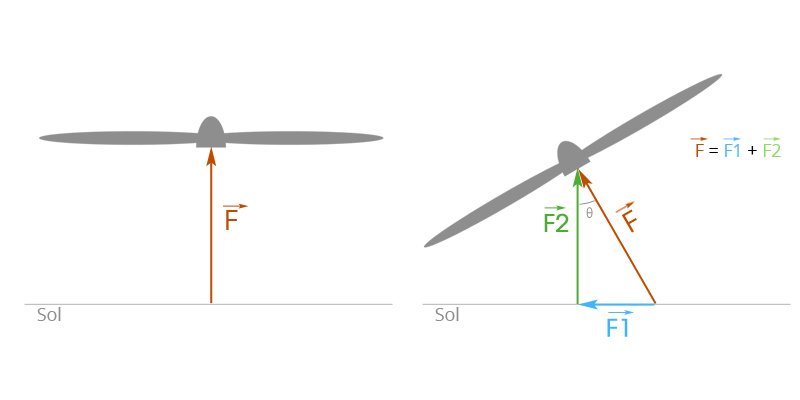
On comprend donc que pour que le drone puisse se déplacer dans une direction il doit être incliné dans cette direction.
A partir de là et en partant du schéma du drone en X, on peut établir le tableau suivant :
| Déplacement | Actions moteurs | |
|---|---|---|
| Monter | Translation sur l'axe de lacet | Augmenter la vitesse de rotation de tous les moteurs de la même manière |
| Descendre | Translation sur l'axe de lacet | Diminuer la vitesse de rotation de tous les moteurs de la même manière |
| Avancer | Rotation sur l'axe de tangage | Diminuer la vitesse de rotation des moteurs de la paire avant ET augmenter la vitesse des moteurs de la paire arrière |
| Réculer | Rotation sur l'axe de tangage | Augmenter la vitesse de rotation des moteurs de la paire avant ET diminuer la vitesse des moteurs de la paire arrière |
| Déplacement latéral gauche | Rotation sur l'axe de roulis | Diminuer la vitesse de rotation des moteurs de la paire gauche ET augmenter la vitesse des moteurs de la paire droite |
| Déplacement latéral droit | Rotation sur l'axe de roulis | Augmenter la vitesse de rotation des moteurs de la paire gauche ET diminuer la vitesse des moteurs de la paire droite |
| Rotation horaire | Rotation sur l'axe de lacet | Diminuer la vitesse des moteurs B & C ET augmenter la vitesse des moteurs A & D |
| Rotation anti-horaire | Rotation sur l'axe de lacet | Augmenter la vitesse des moteurs B & C ET diminuer la vitesse des moteurs A & D |
Pour rappel, le sens horaire signifie le sens des aiguilles d'une montre
Les deux derniers déplacements méritent une attention particulière.
On a vu que les hélices étaient placées de manière à compenser leurs forces de réactions.
En ralentissant une paire d'hélices tournant dans le même sens, les forces de réaction ne se composent plus tout à fait et le drone commence à tourner suir lui-même.
C'est sur ce principe que l'on peut décider du sens et de la vitesse de rotation sur son axe de lacet.
Pourquoi on agit toujours sur deux paires de moteurs au lieu d'une seule ?
Si on se contente d'agir sur une seule paire de moteur, le total des forces sera différent du total avant la correction, le drone na va donc pas garder la même altitude.
En agissant par paires opposées, on s'assure que le total des forces reste inchangé et ainsi que le drone conserve son altitude.
3. Première approche de l'asservissement
De base, un drone ne tient pas en équilibre dans les airs.
En effet, dans la physique sentimentale on aurait tendence à croire que si on fait tourner les moteurs à la même vitesse, ça suffit à faire garder une assiette stable au drone. Mais dans la réalité, les moteurs génèrent des vibrations répercutées sur la carlingue, les hélices génèrent des turbulances, le drone n'est jamais parfaitement équilibré, le vent souffle de manière anarchique...
Bref, le drone va forcément s'incliner d'un côté ou d'un autre au bout d'un moment. Comme il n'y a pas de correction sur l'inclinaison, le drone va continuer à prendre de l'angle jusqu'à se viander lamentablement.
Ainsi intervient la notion d'asservissement.
Qu'est-ce que c'est que ce gros mot ?
Faisons une analogie. Vous êtes au volant d'une voiture lancée à 130 km/h sur une route parfaitement droite et vous voulez qu'elle suive cette trajectoire. Vous avez deux solutions.
Première solution
Appuyer sur le champignon et fermer les yeux en espérant que la voiture va aller tout droit.
On est bien d'accord que la voiture va forcément dévier de sa trajectoir pour aller se manger le talu.
Deuxième solution
Vous regardez la route et lorsque vous constatez que la voiture dévie de sa trajectoire vous corriger cette dernière en donnant un coup de volant proportionné à l'erreur.
Dans cette seule phrase nous avons plusieurs conceptes clés de l'asservissement :
- La voiture doit aller tout droit : il s'agit là de la consigne à suivre
- Vous regardez : vous êtes en fait un capteur
- La voiture dévie : notions d'erreur par rapport à la consigne
- coup de volant proportionné : notion de correction adaptée à l'erreur
Si vous donnez un violent coup de volant, la correction apportée va être pire que l'erreur initiale et la prochaine correction va être encore pire : votre système va commencer à osciller de plus en plus fort, la correction est inefficace et vous avez ainsi un système instable.
Maintenant si la correction apportée est adaptée à l'erreur, on obtient ainsi un système asservi stable.
La notion de stabilité peut être déterminée de différente manière (diagrammes de Black, fonction de transfert...), nous y reviendrons dans les prochains chapitres
Les deux solutions que nous venons de citer portent respectivement le nom d'asservissement en boucle ouverte (pas de contre-réaction) et asservissement en boucle fermée. Il ne fait aucun doute que c'est la deuxième solution que nous mettrons en place lors de cette série de tutoriels.
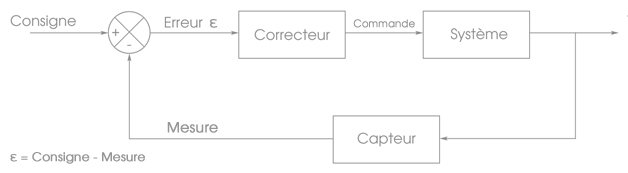
Pour résumer, un asservissement en boucle fermée c'est donc :
- Un système à asservir
- Une consigne
- Au moins un capteur
- Un correcteur
Et d'un point de vue schématique, voici comment cela se représente :
Cette première approche de l'asservissement n'est qu'une vulgarisation, nous aurons tout le loisir d'y revenir plus en détail lorsque nous attaquerons son implémentation pour Arduino.
4. Conclusion
Nous venons de poser les bases nécessaires à la compréhension du fonctionnement d'un drone. Ces notions nous seront indispensables pour la suite et notamment pour les phases de conception/réalisation.
Dans le prochain toturiel, nous verrons plus en détail l'anatomie d'un drone, les éléments physiques et électroniques qui le composent.
A bientôt sur Fire-DIY !
Autres articles dans la catégorie Bricolage :



Vos réactions (0) :
- Sois le/la premier(e) à commenter cet article !