Mesurer des angles avec un Arduino - drone ch.7

Sommaire
- 1. Introduction
- 2. Câblage
- 3. Configurer le MPU6050
- 3.1 Sensibilité du gyroscope
- 3.2 Sensibilité de l'accéléromètre
- 3.3 Fréquence d'horloge
- 3.4 Filtre passe-bas
- 3.5 Configuration complète
- 4. Lire les données brutes du MPU6050
- 5. Mesures angulaires avec le gyroscope
- 5.1 Conversion des données brutes
- 5.2 Calcul des offsets
- 5.3 Conversion en degrés
- 5.4 Transfert de rotation de l'axe Z
- 6. Mesures angulaires avec l'accéléromètre
- 7. Renforcement des mesures
- 7.1 Compenser la dérive du gyroscope
- 7.2 Démarrage sur plan incliné
- 8. Implémentation finale
- 9. Conclusion
1. Introduction
Salut les makers,
Aujourd'hui je vous propose un article sur le capteur MPU6050 qui est un gyroscope/accéléromètre 3 axes.
On a déjà vu dans le chapitre 5 comment utiliser le MPU6050. Pourquoi un autre chapitre là-dessus ?
Et bien parce que après réflexion, il s'avère que la librairie utilisée dans le chapitre 5 ne permet pas d'avoir une lecture des mesures à une fréquence suffisamment élevée pour notre drone.
Quoi qu'il en soit, toute la partie théorique sur le fonctionnement des gyroscopes/accéléromètres et la présentation du capteur MPU6050 restent valables. Aussi je vous invite à les lire si ce n'est déjà fait.
Nous allons aujourd'hui voir comment mettre en place un IMU : Inertial Measurement Unit.
2. Câblage
Le MPU6050 utilise le protocole de communication I²C dont la connexion est réalisée par l'intermédiaire de deux lignes :
- SDA (Serial Data Line) : ligne de données bidirectionnelle
- SCL (Serial Clock Line) : ligne d'horloge de synchronisation bidirectionnelle
Dans le monde Arduino, il existe une librairie dédiée à ce protocole : Wire.
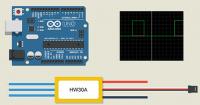
En lisant la doc de la librairie Wire Arduino, on voit que sur un Arduino Uno ce sont les entrées analogiques A4 et A5 qui correspondent respectivement à SDA et SCL. On cable donc tout ça ensemble.
Le MPU a besoin d'être alimenté en 3.3V, on relie donc la broche Vcc à la broche 3.3V de l'Arduino et le GND au GND de l'Arduino.
Ce qui nous donne au final ce câblage :

3. Configurer le MPU6050
3.1 Sensibilité du gyroscope
Le capteur MPU6050 embarque son propre processeur (Digital Motion Processor) et qui dit processeur dit datasheet, comme pour l'ATMega de notre Arduino Uno.
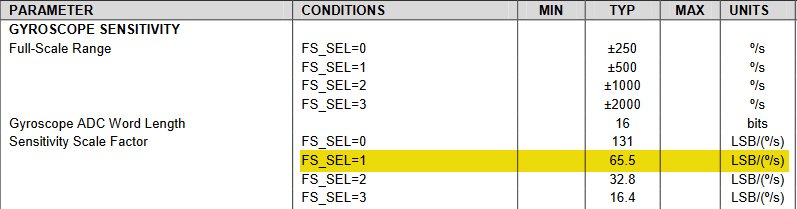
En fouillant dans la datasheet des registres du MPU6050, on peut voir page 14 la description du registre 27 "Gyroscope Configuration", de son petit nom GYRO_CONFIG. On peut y lire que le gyroscope peut être utilisé avec différentes plages de mesure en fonction du facteur de sensibilité FS_SEL :
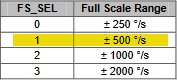
Dans notre cas, une plage de ±500°/sec est largement suffisante, ce qui nous amène à utiliser le facteur FS_SEL = 1.

On voit que ce registre a une taille de 8 bits et que FS_SEL est codé sur les bits 3 et 4. La valeur 1 en binaire s'écrit donc 01.
Les bits 0, 1 & 2 sont réservés, on les laisse donc à 0.
Les bits 5, 6 & 7 servent à effectuer un auto-test des axes X, Y & Z. Ça ne nous intéresse pas, on les laisse donc à 0.

Tout ceci nous donne au final 00001000 en binaire, soit 0x08 en hexadécimal.
Enfin, l'adresse du registre est 0x1B.
Ne me croyez pas sur parole, allez fouiller dans la datasheet. C'est toujours très instructif et formateur 🙂
Nous avons maintenant tous les éléments pour configurer ce registre à l'aide de la librarie Wire :
Wire.beginTransmission(0x68); // Start communication with MPU
Wire.write(0x1B); // Request the GYRO_CONFIG register
Wire.write(0x08); // Apply the desired configuration to the register : +-500°/s
Wire.endTransmission(); // End the transmission
3.2 Sensibilité de l'accéléromètre
Même tarif pour l'accéléromètre : le registre ACCEL_CONFIG permet de configurer la plage de fonctionnement de l'accéléromètre.
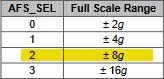
Une plage de ±8g est suffisante pour notre drone, ce qui nous amène à utiliser le facteur AFS_SEL = 2.

La paramètre AFS_SEL est codé sur les bits 3 & 4. La valeur 2 en binaire s'écrit alors 10.
Les bits 0, 1 & 2 sont réservés, on les laisse donc à 0.
Les bits 5, 6, 7 servent à effectuer un auto-test des axes X Y Z respectivement. Ça ne nous intéresse pas, on les laisse donc à 0.

Ce qui nous donne : 00010000 en binaire, soit 0x10 en hexadécimal.
Enfin, l'adresse du registre ACCEL_CONFIG est 0x1C en hexadécimal.
Ce qui nous donne le code Arduino suivant :
Wire.beginTransmission(0x68); // Start communication with MPU
Wire.write(0x1C); // Request the ACCEL_CONFIG register
Wire.write(0x10); // Apply the desired configuration to the register : +-8g
Wire.endTransmission(); // End the transmission
3.3 Fréquence d'horloge
Plus loin dans la datasheet, on arrive sur la page du registre Power Management. Ce registre nous permet de choisir la source d'horloge que le MPU va utiliser au travers du paramètre CLKSEL.
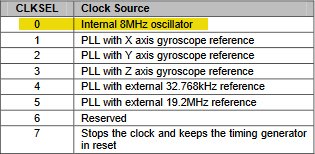
Nous allons utiliser ici son horloge interne de 8MHz, soit CLKSEL = 0.

Là encore, on voit que ce registre est codé sur 8 bits.
CLKSEL est codé sur les bits 0, 1 & 2. La valeur 0 en binaire s'ecrit alors 000.
Le bit 3 TEMP_DIS (temparture disabled) sert à désactiver la lecture de la température lorsqu'il est à 1. On va garder cette information, on laisse donc ce bit à 0.
On laisse le reste à 0, ce qui nous donne au final 00000000 en binaire, soit 0x00 (hex).
Enfin, l'adresse du registre est 0x6B en hexadécimal.
Ce qui nous donne le code Arduino suivant :
Wire.beginTransmission(0x68); // Start communication with MPU
Wire.write(0x6B); // Request the PWR_MGMT_1 register
Wire.write(0x00); // Apply the desired configuration to the register
Wire.endTransmission(); // End the transmission
3.4 Filtre passe-bas
Allez courage, plus qu'un dernier registre à configurer 🙂
Le dernier registre, de son petit nom CONFIG, va nous servir à configurer la fréquence de coupure du filtre passe-bas du gyroscope et de l'accéléromètre au travers du paramètre DLPF_CFG.
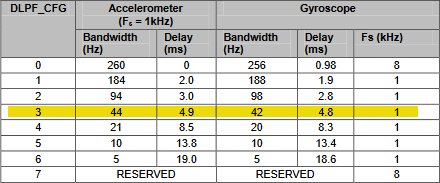
On va partir sur une fréquendce d'environ ~43Hz, ce qui nous amène à DLPF_CNG = 3.

Ce dernier est codé sur les bits 0 à 2. La valeur 3 en binaire s'écrit alors 011.
On laisse les autres bits à 0, ce qui nous amène à 00000011 en binaire, soit 0x03 en héxadécimal.
Enfin, l'adresse du registre est 0x1A en héxadécimal.
Ce qui nous amène au code Arduino suivant :
Wire.beginTransmission(0x68); // Start communication with MPU
Wire.write(0x1A); // Request the CONFIG register
Wire.write(0x03); // Apply the desired configuration to the register : DLPF about 43Hz
Wire.endTransmission(); // End the transmission
3.5 Configuration complète
Notre capteur est maintenant configuré au poil de cul, mais comme on aime le code bien structuré, on range tout ça dans une fonction, ce qui donne le code tout propre suivant :
#define MPU_ADDRESS 0x68 // I2C address of the MPU-6050
/**
* Configure la plage de fonctionnement du gyroscope et de l'accéléromètre :
* - accéléromètre: +/-8g
* - gyroscope: 500°/sec
*
* @return void
*/
void setupMpu6050Registers() {
// Configure power management
Wire.beginTransmission(MPU_ADDRESS); // Start communication with MPU
Wire.write(0x6B); // Request the PWR_MGMT_1 register
Wire.write(0x00); // Apply the desired configuration to the register
Wire.endTransmission(); // End the transmission
// Configure the gyro's sensitivity
Wire.beginTransmission(MPU_ADDRESS); // Start communication with MPU
Wire.write(0x1B); // Request the GYRO_CONFIG register
Wire.write(0x08); // Apply the desired configuration to the register : ±500°/s
Wire.endTransmission(); // End the transmission
// Configure the acceleromter's sensitivity
Wire.beginTransmission(MPU_ADDRESS); // Start communication with MPU
Wire.write(0x1C); // Request the ACCEL_CONFIG register
Wire.write(0x10); // Apply the desired configuration to the register : ±8g
Wire.endTransmission(); // End the transmission
// Configure low pass filter
Wire.beginTransmission(MPU_ADDRESS); // Start communication with MPU
Wire.write(0x1A); // Request the CONFIG register
Wire.write(0x03); // Set Digital Low Pass Filter about ~43Hz
Wire.endTransmission(); // End the transmission
}
4. Lire les données brutes du MPU6050
Maintenant que le MPU6050 est câblé et configuré, il ne reste plus qu'à lire les données brutes du capteur.
On constate dans la table des registres que les registres 59 à 72 stockent les valeurs de sorties de l'accéléromètre, de la température et du gyroscope et qu'ils commencent à l'adresse 0x3B.
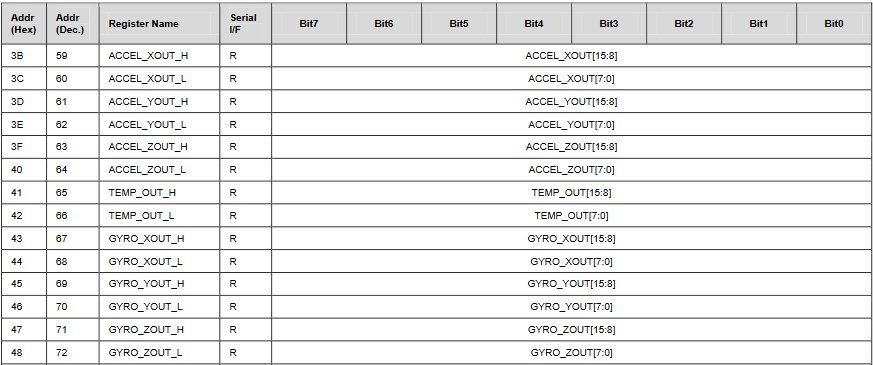
On va donc simplement requêter le contenu de ces 14 registres, en commençant à l'adresse 0x3B :
#include <Wire.h>
#define MPU_ADDRESS 0x68 // I2C address of the MPU-6050
int acc_raw[3] = {0,0,0};
int gyro_raw[3] = {0,0,0};
int temperature = 0;
void readSensor() {
Wire.beginTransmission(MPU_ADDRESS);// Start communicating with the MPU-6050
Wire.write(0x3B); // Send the requested starting register
Wire.endTransmission(); // End the transmission
Wire.requestFrom(MPU_ADDRESS,14); // Request 14 bytes from the MPU-6050
// Wait until all the bytes are received
while(Wire.available() < 14);
acc_raw[X] = Wire.read() << 8 | Wire.read(); // Add the low and high byte to the acc_raw[X] variable
acc_raw[Y] = Wire.read() << 8 | Wire.read(); // Add the low and high byte to the acc_raw[Y] variable
acc_raw[Z] = Wire.read() << 8 | Wire.read(); // Add the low and high byte to the acc_raw[Z] variable
temperature = Wire.read() << 8 | Wire.read(); // Add the low and high byte to the temperature variable
gyro_raw[X] = Wire.read() << 8 | Wire.read(); // Add the low and high byte to the gyro_raw[X] variable
gyro_raw[Y] = Wire.read() << 8 | Wire.read(); // Add the low and high byte to the gyro_raw[Y] variable
gyro_raw[Z] = Wire.read() << 8 | Wire.read(); // Add the low and high byte to the gyro_raw[Z] variable
}
5. Mesures angulaires avec le gyroscope
5.1 Conversion des données brutes
Maintenant que l'on est capable de lire des données brutes du capteur, reste à les interpréter.
On a configuré le facteur de sensibilité du gyroscope FS_SEL = 1 pour une plage de fonctionnement de ±500°/sec. On constate alors dans la doc que la valeur brute retournée est $65.5$ lorsque la vitesse angulaire est de 1°/s.
AInsi, pour obtenir la valeur réelle il suffit de diviser la valeur brute par $65.5$.
Exemple
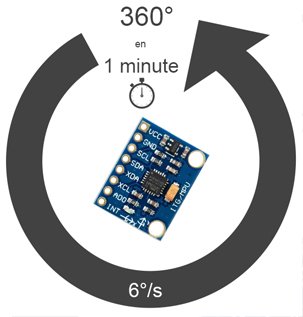
Si le gyro fait un tour complet en 1 minute, ça signifie qu'il fait 360° en 60s, soit 6°/s en moyenne. La valeur en sortie du gyro pour une telle vitesse angulaire est de 393. Si on la divise par le facteur de sensibilité :
$\dfrac{393}{65.5} = 6°.s^{-1}$
On retombe bien sur la valeur de 6°/s !
Si maintenant le gyro tourne à une vitesse de 500°/s (ce qui sera notre limite max), on obtient en sortie une valeur de $500 \times 65.5 = 32750$
Cette valeur correspond pratiquement à la valeur maximum d'un integer (32767). On sait déjà qu'on pourra stocker les valeurs brutes du gyroscope dans des variables de type integer.
5.2 Calcul des offsets
Nous sommes maintenant capables d'interpréter les valeurs lues.
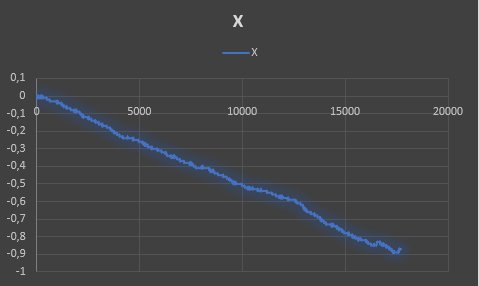
Voici un relevé de mesures brutes du gyro alors que ce dernier ne bouge pas et est horizontal.
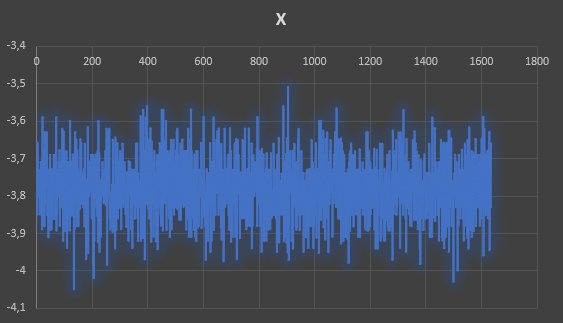
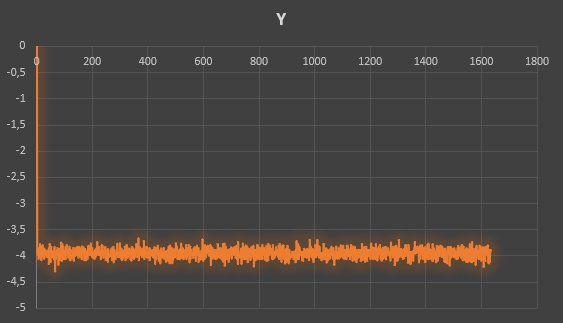
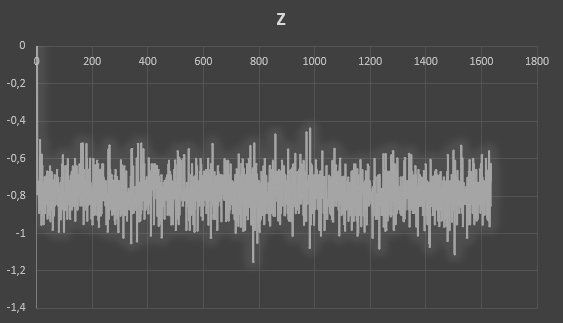
Alors que les valeurs devraient tourner autour de 0, elles sont décalées par rapport à la réalité. Il convient alors d'estimer ce décalage pour le compenser.
Pour faire ça, on va simplement prendre un lot de mesures et calculer leur valeur moyenne. Ça nous donnera l'offset moyen à appliquer sur chaque axe.
Et voici comment l'implémenter en langage Arduino:
// On déclare quelques constantes pour la lisibilité
#define X 0
#define Y 1
#define Z 2
float gyro_offset[3] = {0,0,0};
int gyro_raw[3] = {0,0,0};
/**
* Calibrage du MPU6050 : on prend 2000 échantillons et on calcule leur valeur moyenne.
* Durant cette étape, le drone doit rester sur une surface horizontal sans bouger.
*
* @return void
*/
void calibrateMpu6050()
{
int max_samples = 2000;
for (int i = 0; i < max_samples; i++) {
readSensor();
gyro_offset[X] += gyro_raw[X];
gyro_offset[Y] += gyro_raw[Y];
gyro_offset[Z] += gyro_raw[Z];
// Just wait a bit before next loop
delay(3);
}
// Calculate average offsets
gyro_offset[X] /= max_samples;
gyro_offset[Y] /= max_samples;
gyro_offset[Z] /= max_samples;
}
Il ne reste alors qu'à soustraire ces offsets aux valeurs brutes avant de les diviser par le facteur de sensibilité:
void loop()
{
readSensor();
real_value[X] = (gyro_raw[X] - gyro_offset[X]) / SSF_GYRO;
real_value[Y] = (gyro_raw[Y] - gyro_offset[Y]) / SSF_GYRO;
real_value[Z] = (gyro_raw[Z] - gyro_offset[Z]) / SSF_GYRO;
}
C'est bien joli tout ça mais comment on fait pour avoir des valeur en degrés directement ?
C'est vrai que le pour le moment on a du degré/seconde or on veut bel et bien des degrés tout court !
5.3 Conversion en degrés
Reprenons notre exemple d'un tour complet en 1 minute, soit 6°/s.
On a en sortie une valeur brute de 393.
Si chaque seconde (à intervalles réguliers donc) on additionne les valeurs relevées :
$393 \times 60 = 23580$
Si maintenant on divise cette valeur par le coefficient trouvé dans la datasheet :
$\dfrac{23580}{65.5} = 360°$
Et bim, on retombe sur notre valeur de 360° !
Heu... on vient de faire quoi là exactement ?
Le fait de sommer des échantillons à intervalles réguliers s'appelle intégrer. Il s'agit de la même fonction intégrale que l'on voit en Terminale S.
Cool, les maths de lycée ne servent pas complètement à rien !
La vitesse angulaire est la dérivée, par rapport au temps, de la position angulaire. Du coup sa semble logique qu'en intégrant la vitesse on retombe sur la position angulaire 🙂
En sommant toutes les secondes, on est capable de connaitre l'angle du gyroscope toutes les secondes. On commence à toucher au but mais ça n'est pas très précis. Avec une donnée par seconde, le drone va avoir le temps de partir en vrille avant qu'on ait effectué la moindre correction !
Du coup, on va tabler sur une fréquence de rafraichissement de 250Hz. En dessous de 200Hz, notre asservissement risque d'être inefficace.
On parle quand même de faire tenir un machin dans les airs, ça implique nécessairement un asservissement balaise !
250Hz signifie une période de 4ms ce qui nous permet d'intégrer toutes les 4ms au lieu de toutes les 1 seconde. Concrètement, ça veut dire qu'on a une mesure angulaire toutes les 4ms.
Ça signifie également qu'on doit alors diviser la valeur brute du gyro par 250.
En langage mathématique, ça se traduit comme ceci
$$\sum_{i=1}^{n} \dfrac{raw_i - offset}{SSF \times 250}$$
Intégrer dans le domaine continue se fait avec le symbole $\int$ et intégrer dans le domaine discret (numérique) se fait avec le symbole $\sum$, mais ils représentent au final la même chose.
Et en langage Arduino, ça se traduit comme ça:
angle[PITCH] += (gyro_raw[X] - gyro_offset[X]) / (250 * SSF_GYRO);
angle[ROLL] += (gyro_raw[Y] - gyro_offset[Y]) / (250 * SSF_GYRO);
Application numérique
Vérifions tout ça avec notre exemple de rotation en 1 minute.
Ça prend 60 secondes pour faire 360°. Durant cette rotation, on effectue 250 lectures par seconde, donc $250_{lectures} \times 60_{secondes} = 15000_{lectures}$ durant ces 60 secondes.
Le gyroscope nous donne une valeur brute de 393. Du coup, on déduit l'angle parcouru de la sorte :
$$\dfrac{15000 \times 393}{250 \times 65.5} = 360°$$
Impec, ça fonctionne !
Et vous pouvez tester avec 30sec, 5sec, 0.5sec si ça vous chante, vous obtiendrez alors la position angulaire correspondante.
5.4 Transfert de rotation de l'axe Z
Il nous reste encore un problème à résoudre.
Lorsque je positionne l'IMU sur un plan incliné à 45° comme ci-dessous, il mesure bien 45° sur son axe de roulis :
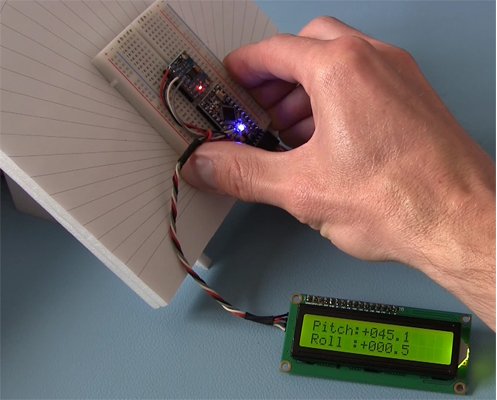
Maintenant, si on le fait pivoter sur son axe Z (lacet/yaw), l'axe de roulis est maintenant parallèle au sol, il devrait donc mesurer un angle de 0° et pourtant la mesure indique toujours 45° !
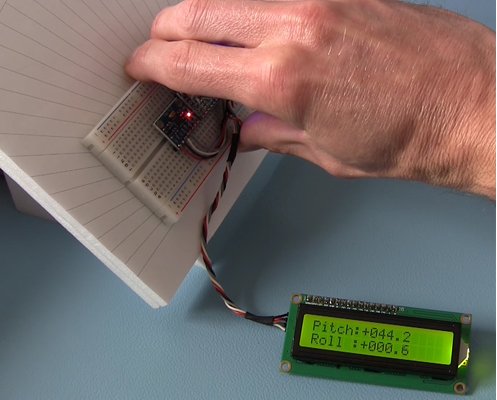
Et pour cause, l'axe de roulis n'a subi aucune accélération, le gyroscope n'a donc mesuré aucun changement de vitesse angulaire.
Pour prendre en compte ce phénomène, il faut effectuer un transfert d'angle en utilisant simplement la fonction $sin()$ :
pitch_angle += roll_angle * sin(yaw_raw)
En appliquant ce dernier correctif, ça nous donne le code suivant :
#include <Wire.h>
#define MPU_ADDRESS 0x68 // I2C address of the MPU-6050
#define SSF_GYRO 65.5 // Sensitivity Scale Factor of the gyro
#define X 0 // X axis
#define Y 1 // Y axis
#define Z 2 // Z axis
#define FREQ 250 // Sampling frequency
int acc_raw[3] = {0,0,0};
int gyro_raw[3] = {0,0,0};
int period;
int temperature = 0;
unsigned long int loop_timer;
unsigned long int now; // Exists just to reduce the calls to micros()
float gyro_angle[3] = {0,0,0};
float gyro_offset[3] = {0,0,0};
void setup() {
// Setup MPU registers
setupMpu6050Registers();
// Calibrate MPU6050 calculating average offset of each axis
calibrateMpu6050();
// Calculate period in µs
period = (1000000/FREQ);
// Init loop timer
loop_timer = micros();
}
void loop() {
readSensor();
calculateGyroAngles();
// Do nothing until sampling period is reached
while((now = micros()) - loop_timer < period);
loop_timer = now;
}
/**
* Calculate angles with gyro data
*/
void calculateGyroAngles()
{
// Substract offsets
gyro_raw[X] -= gyro_offset[X];
gyro_raw[Y] -= gyro_offset[Y];
gyro_raw[Z] -= gyro_offset[Z];
// Angle calculation
gyro_angle[X] += gyro_raw[X] / (FREQ * SSF_GYRO);
gyro_angle[Y] += (gyro_raw[Y]) / (FREQ * SSF_GYRO);
// Transfer roll to pitch if IMU has yawed
gyro_angle[Y] -= gyro_angle[X] * sin(gyro_raw[Z] * (PI / (FREQ * SSF_GYRO * 180)));
gyro_angle[X] += gyro_angle[Y] * sin(gyro_raw[Z] * (PI / (FREQ * SSF_GYRO * 180)));
}
Super ça marche ! Mais pour un court moment seulement...
Après quelques instants et bien que le capteur ne bouge pas, on constate que les valeurs mesurées dérivent et s'éloignent de plus en plus de leur valeur réelle. C'est un phénomène connu des gyroscopes appelé la dérive.
Les vibrations des moteurs vont accélérer ce phénomène et on va vite se retrouver avec des mesures complètement foireuses.
Autre point problématique, si on démarre le capteur sur un plan incliné, il va prendre cette inclinaison comme référence du 0°. Dans certains cas ça peut être utile mais dans le nôtre c'est carrément problématique !
Pas de panique, nous allons utiliser l'accéléromètre pour corriger tout ça 😎
6. Mesures angulaires avec l'accéléromètre
Un accéléromètre mesure l'accélération subie et l'exprime en $g$. $1g$ représente l'accélération de pesanteur sur Terre, soit environ $9,8m.s^{-2}$ et des bananes.
L'accéléromètre au repos mesure donc une accélération de $1g$.
Le schéma suivant est une analogie du fonctionnement d'un accéléromètre. On peut voir une masse (en jaune) attachée par des fils aux axes X et Y, orthogonaux entre eux.
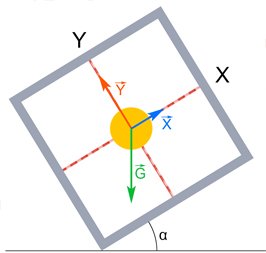
L'accéléromètre mesure l'accélération subie sur chaque axe.
Le vecteur gravité (en vert) de la masse jaune n'est autre que la somme des deux vecteurs X et Y :
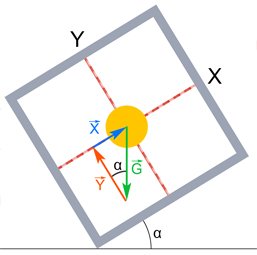
On se se retrouve alors avec un triangle rectangle donc l'angle adjacent n'est autre que l'angle $\alpha$ que l'on cherche.
On peut donc utiliser Pythagore pour calculer la norme du vecteur gravité : $G = \sqrt{X^2 + Y²}$
A partir de là, on peut calculer l'angle adjacent:
$\alpha = asin(\dfrac{X}{G})$
On a donc un calcul en deux temps :
- Calul du vecteur gravitation
- Calcul des angles pitch/roll
En langage Arduino, ça se traduit de la sorte:
#define X 0 // X axis
#define Y 1 // Y axis
#define Z 2 // Z axis
int acc_raw[3] = {0,0,0};
float acc_angle[3] = {0,0,0};
float acc_total_vector;
/**
* Calculate angles using the 3 axis accelerometer.
*/
void measureAccelerometerAngles()
{
// Calculate total 3D acceleration vector : √(X² + Y² + Z²)
acc_total_vector = sqrt(pow(acc_raw[X], 2) + pow(acc_raw[Y], 2) + pow(acc_raw[Z], 2));
// To prevent asin to produce a NaN, make sure the input value is within [-1;+1]
if (abs(acc_raw[X]) < acc_total_vector) {
acc_angle[X] = asin((float)acc_raw[Y] / acc_total_vector) * (180 / PI); // asin gives angle in radian. Convert to degree multiplying by 180/pi
}
if (abs(acc_raw[Y]) < acc_total_vector) {
acc_angle[Y] = asin((float)acc_raw[X] / acc_total_vector) * (180 / PI);
}
}
Et on peut voir que le relevé de mesures est très précis !
Alors pourquoi on s'emmerde avec le gyroscope, autant utiliser directement l'accéléromètre, non ?
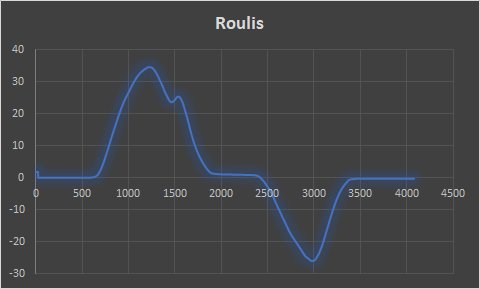
Les vibrations ! Encore et toujours. Voyez plutôt à quoi ressemblent les mesures lorsque le capteur vibre :
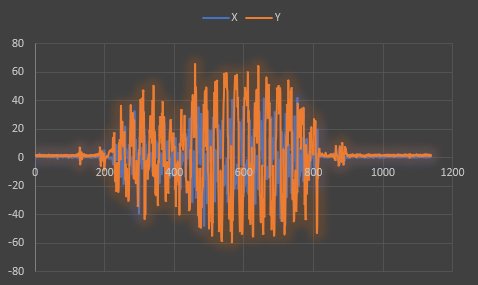
La mesure angulaire à l'aide d'un accéléromètre est très sensible aux vibrations et les mesures deviennent alors inutilisables.
7. Renforcement des mesures
Il est temps de faire un récapitulatif de ce qu'on vient de voir :
- L'IMU gyroscope est moins sensible aux vibrations que l'IMU accéléromètre
- IMU gyroscope dérive dans le temps
- IMU gyroscope prend l'inclinaison de départ comme référence du 0°
- Les vibrations rendent l'IMU accéléromètre inutilisable
Il va falloir de tirer parti du meilleur des deux instruments pour avoir des mesures exploitables.
7.1 Compenser la dérive du gyroscope
Pour compenser la dérive du gyroscope, nous allons utiliser un filtre complémentaire. Le principe est simplement d'utiliser un peu des mesures des deux instruments :
$$Angle\ filtré = \alpha × (Gyroscope\ Angle) + (1 − \alpha) × (Accelerometer\ Angle)$$
Où α est le facteur de correction qui dépend de l’interval de mesure.
Dans notre cas, ça nous donne :
pitch_angle = pitch_angle_gyro * 0.9996 + pitch_angle_acc * 0.0004;
roll_angle = roll_angle_gyro * 0.9996 + roll_angle_acc * 0.0004;
On prend 99.96% de la mesure gyroscope et 0.04% de la mesure de l'accéléromètre et c'est tout !
7.2 Démarrage sur plan incliné
Il nous reste un dernier problème à résoudre : le démarrage sur plan incliné (ou simplement pas parfaitement horizontal).
On va simplement initialiser les mesures du gyroscope avec les mesures de l'accéléromètre. Ça nécessite par contre que le drone ne bouge pas pendant cette phase.
Une fois les valeurs initialisées, on peut utiliser le mix des deux instruments :
if (initialized) {
pitch_angle = pitch_angle_gyro * 0.9996 + pitch_angle_acc * 0.0004;
roll_angle = roll_angle_gyro * 0.9996 + roll_angle_acc * 0.0004;
} else {
pitch_angle_gyro = pitch_angle_acc;
roll_angle_gyro = roll_angle_acc;
initialized = true;
}
8. Implémentation finale
Pour la suite, nous allons nous baser sur cette figure pour définir les sens positifs de rotation :
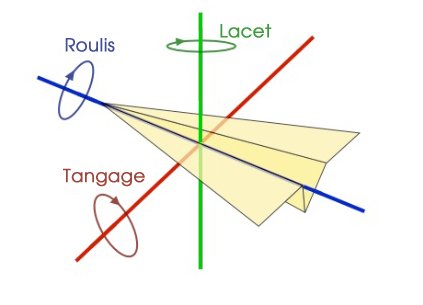
C'est totalement arbitraire, mais il faut bien poser une référence.
En clair, ça signifie :
- aile gauche vers le haut : roulis (roll) positif
- nez vers le haut : tangage (pitch) positif
- nez vers la droite : lacet (yaw) positif
Au final, on obtient le code suivant, disponible sur mon repo GitHub : https://github.com/lobodol/IMU
Le code final est un peu volumineux, vous vous en doutez. C'est pourquoi je ne l'affiche directement pas ici.
9. Conclusion
Nous voici arrivés à la fin de ce chapitre un peu complexe, je vous l'accorde, mais néanmoins indispensable pour la suite.
Nous sommes maintenant capables de recevoir des instructions de vol en radiofréquences, de mesurer l'inclinaison du drone avec une fréquence de rafraichissement de 250Hz, il ne nous reste plus qu'à attaquer l'asservissement du drone !
Mais nous verrons ça dans le prochain et dernier chapitre 🙂
À bientôt sur Fire-DIY !
Autres articles dans la catégorie Electronique :

![Montages à amplificateur opérationnel[THEORIE]](https://www.firediy.fr/media/cache/article_miniature/images/slideshow/aop.jpg)
Vos réactions (0) :
- Sois le/la premier(e) à commenter cet article !